Research

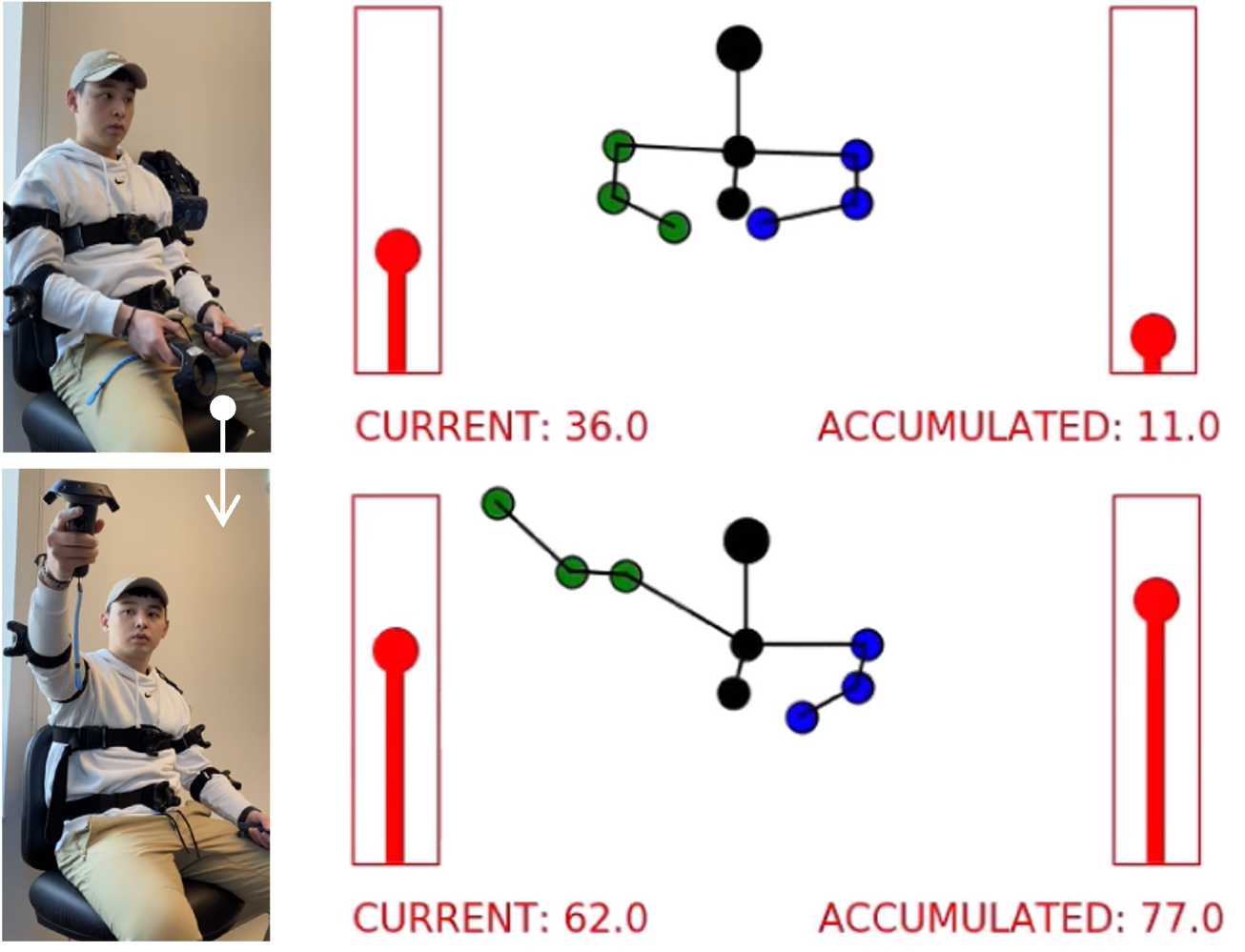
Intuitive Whole-body Teleoperation Interface
Align control with the operator’s perception to simplify complex multi-function coordination.

Semi-autonomous Loco-manipulation
Coordinated locomotion and manipulation on mobile manipulators and humanoids.

Robot Autonomy
Adjustable autonomy with human-in-the-loop for reliable task execution.
Human-Robot Communication
Multimodal interfaces (large language model, gesture, gaze, user state) for efficient collaboration.